RoboCup@Home
Following UBC Open Robotics's success in the RoboCup@Home Education challenge that involved programming a standard platform robot, our goal is to take part in the RoboCup@Home 2023 in the open platform league. This entails designing and implementing an autonomous service robot to take part in the international competition. To realize this goal, our subteams are working on their respective parts of the robot.
Sub-projects

Arm - Mechanical
Designing a 6 Degrees of Freedom (6DoF) robot arm commonly used in industrial manufacturing.
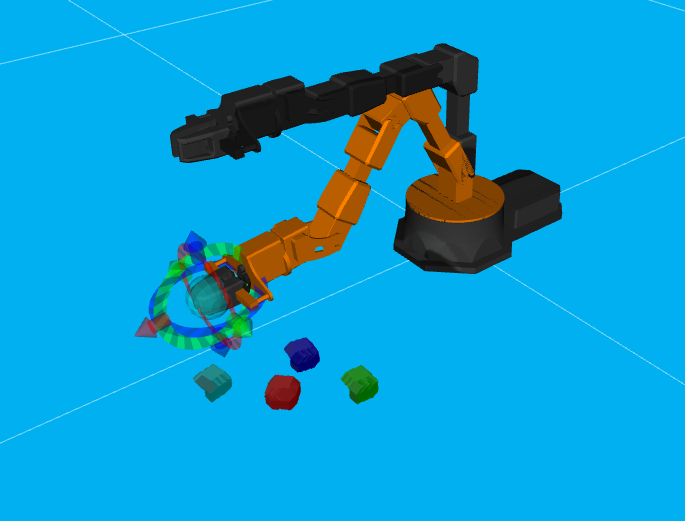
Arm - Software Manipulation
Training the robotic arm to move via Reinforcement Learning.
Computer Vision
Using computer vision for object classification and recognition.
Drivetrain
Enabling our robot to move from point A to B.
Gripper
Robotic gripper for everyday objects.
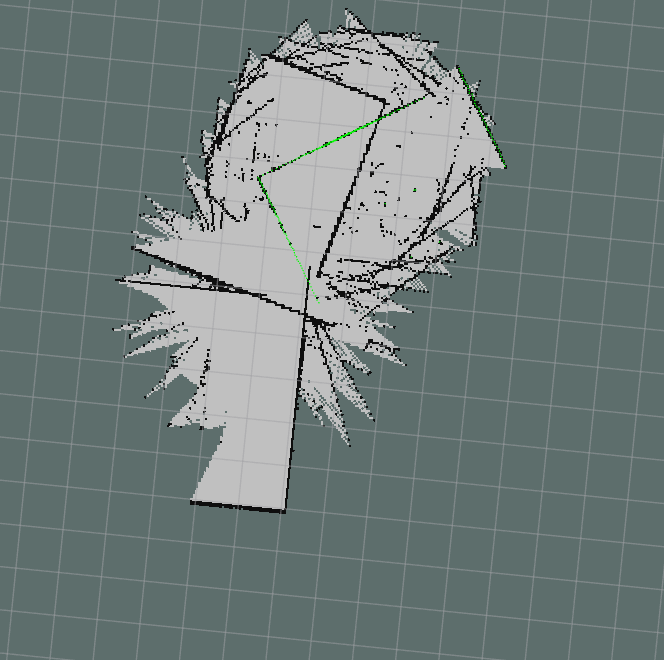
Navigation
Path planning and obstacle avoidance using SLAM.
Power
Subteam that determines the power needs of the robot, finds a battery solution, and designs the power electronics (buck converters, BMS modules).
Goals
The RoboCup@Home project allows students to apply and strengthen their knowledge of mechanical, electrical, and software design through the annual international RoboCup@Home competition
Ideas
To build up the required technologies gradually a basic home environment is provided as a general scenario.
Objective
This project aims to develop service and assistive robot technology highly relevant for personal domestic use. It is the largest international annual competition for autonomous service robots and is part of the RoboCup initiative
Future
We will continue developing the software architecture, which will pave the path for the Robocup@Home 2021 Open League Challenge as well as expand our relationship with the Robocup@Home Community across North America and lead initiatives that promote robotics.
Progress and Milestones
Started in 2018, we have made steady continous progress. Currently, many portions of this project is on hold. However, we are working as a team to return fully in coming years.